Iván Hernández Dalas: 11 reasons robots struggle to scale in high-mix manufacturing
High-mix manufacturing poses many challenges for robotic automation. We have seen many impressive demonstrations of robotic automation in high-mix applications over the last 10 years. Often these demonstrations are at technology readiness level (TRL) 5 or 6 level. These demonstrations generate a great deal of interest in technology and people start expecting rapid technology transition.
However, technology maturation in this area has been very slow. Very few robotics technologies have been actually deployed in high-mix applications. This article explores the reasons behind this slow transition.
Robotic automation for high-mix applications requires a fundamentally different approach. Components of this approach include:
- 1. Sensor-based systems for building part and workspace models
- 2. Automated robot trajectory generation based on part models constructed from sensing
- 3. Control system to handle sensor uncertainties
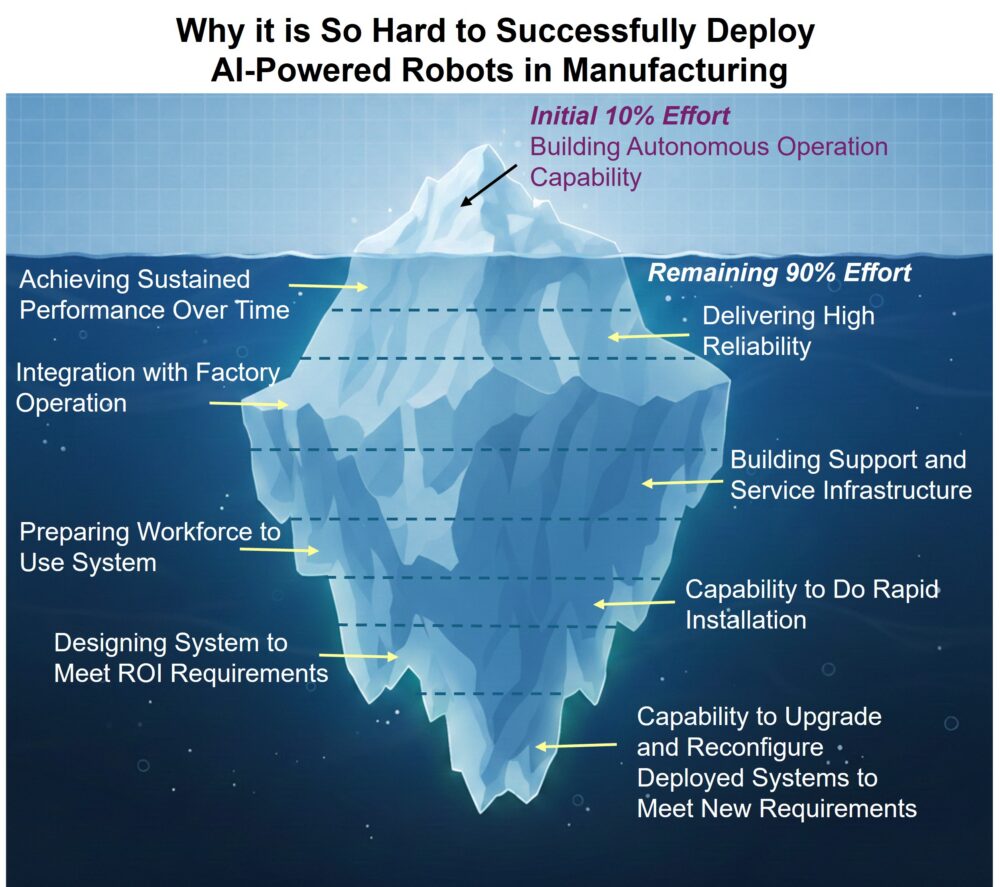
Most technology demonstration projects focus on development of perception, planning, and control capabilities to automate the task. Sometimes, novel human-robot interaction capabilities are developed as part of these demonstration efforts. Success metrics during demonstration often focus on showing that acceptable process quality can be achieved using a small number of representative parts.
Here are reasons why robotics demonstrations fail to transition to deployments in high-mix manufacturing environments.
1. Lack of data to effectively use AI-based approaches
High-mix manufacturing requires use of sensors to localize parts and assess quality. So, using an AI-based perception system becomes an attractive option to supplement traditional machine vision approaches. Only a limited amount of data can be collected during the demonstration project to train a model to perform perception function. Sensor noise is carefully controlled during demonstrations to ensure success. Field deployments inherently have a high amount of sensor noise that breaks the perception system trained on limited data.
Creating a robust system capable of functioning well in the field requires training the perception system with a large amount of data and selecting an architecture that can effectively deal with the sensor noise. Building a robust perception system capable of performing well in the field requires having access to many robotic cells and collecting data from these cells under a wide variety of conditions.
This is not feasible during the proof-of-concept demonstration systems. Using synthetic data is a viable approach, However, synthetic data is only useful if it matches reality. So, building a synthetic data generation pipeline is not useful during demonstration stages. Therefore, the perception system developed during demonstrations often requires significant redesign. This takes significant time and resources.
2. Limited part diversity makes it difficult to design robust algorithms
Demonstrations are performed on a limited number of part geometries. This means that the planning and control capabilities are not tested rigorously. New part geometries encountered during deployment pose challenges for planning and control algorithms, often requiring major upgrades to the approach that can take a long time to complete. Properly validating planning and control capabilities requires testing with several hundred part geometries. This scale of testing is not possible during the demonstration phase. Therefore, conclusions drawn regarding the feasibility of planning and control approaches do not generalize during deployment.
3. Processes are not optimized for robots
Many manual processes are designed based on human capabilities. Robots have fundamentally different capabilities. Demonstrations that focus on robotic systems that are human-competitive in terms of speed are often far from being cost-effective during deployment. Successfully integrating robotic automation requires process innovations by developing new process recipes. For example, robots can apply much higher forces and therefore can use less expensive abrasives and dramatically reduce abrasive costs.
Robots are very consistent and, therefore, can use aggressive process parameters without the risk of causing part damage. This has the potential to dramatically reduce the cycle time. Automation can also use tool motions that would not be feasible for humans to execute due to speed or vibration considerations. Most demonstration projects focus on automation and do not have resources to realize process innovation needed for successful deployment. It is often possible to achieve superhuman performance by investing adequate resources in process innovation for robotic automation and creating pathways to favorable ROI for successful deployment.

4. Human-system interaction issues are not considered
In many applications, full automation is not feasible. Often, we can realize significant benefits if we can automate 90% or 95% of the task. This ensures that the automation solution does not become overly expensive to automate the hardest part of the job. Therefore, many demonstration projects target automation of 90% or 95% of the task. The remaining task is performed by humans.
This model works in principle. However, most demonstration projects ignore issues related to human integration with robotic cells. For example, it is important to figure out what work a human worker would do when the robot is working on the part. They cannot be simply watching the robot and waiting for their turn to do the work. Unless the human worker utilization can be kept very high, it is difficult to justify robotic automation cost. For example, if a human worker can support multiple cells, then human worker utilization can be high and automation can be justified.
Alternatively, a robotic cell can be designed to keep the robot busy for 30 minutes or more and therefore giving the human operator sufficient time to work on other tasks Most demonstration projects focus on the design of a single cell. Therefore, human integration topics are ignored. This leads to design of systems that cannot be justified because they lead to a lot of idle time for human workers.
5. Workforce readiness issues are not addressed
Workforce related issues are often not addressed during demonstration projects. Smart automation is often presented as a solution to labor shortage. However, humans are an integral part of the manufacturing process. To get the full value of automation, we need workers with the right skill sets. For example, human operators may need to interact with automated machines and robotic cells by feeding parts into them or removing parts from them. If human workers cannot effectively utilize the automated equipment, it cannot deliver value.
For existing workers to perform effectively, the interface to the automation system must be intuitive and simple to use. Ease of user interface and training is a key to getting buy-in from the workforce. Another challenge is the maintenance and servicing of automation technologies. Often developing in-house talent to maintain automation equipment becomes cost-prohibitive and the systems fail to transition due to lack of workforce readiness.
6. Low system availability due to failures and time needed to repair
Robotic cells that are deployed in high-mix applications are complex cyber-physical systems operating in dynamic environments. Therefore, there is significant potential for the onset of adverse conditions that if not handled promptly can serve as a precursor to failure. Below are a few representative examples. Pressure in the airline can fluctuate and can lead to the malfunction of pneumatic components; Suboptimal debris removal can lead to problems with imaging systems; Increased friction in the rail drive system can lead to overheating of motors; Human errors can lead to the loading of improper tools or insufficient clamping of parts. Any of these errors can lead to serious failure and cause damage. For example, if the sensing system is performing suboptimally, then it may lead to a collision that may break a cable or the tool.
Recovering from serious failures requires considerable human expertise and significant downtime. This limits system availability. Delivering high system availability requires developing and deploying an AI-based Prognostics and Health Management (PHM) system. A single robotic cell implementation during demonstration will not be able to produce adequate amounts of training data to implement a PHM system to deliver an adequate level of system availability. Therefore, PHM related issues are not addressed during demonstration. Developing a PHM system needed for successful deployment requires a substantial amount of additional resources.
7. Lack of service infrastructure
A PHM system can issue alerts and bring the system to a safe state. Sometimes, recovering from adverse events detected by the PHM system requires service. Therefore, the PHM system needs to be complemented by a service infrastructure. This requires fielding a service team to support robotic cells. If an organization has deployed very few cells, then it is economically infeasible for them to develop an in-house service team. They will most likely need an outside company to service the robotic cells. These service related issues are not addressed during the demonstration projects. Without addressing this issue, it is not possible to deploy robotic solutions in high-mix manufacturing applications.
8. Robotic cells are not optimized to deliver acceptable performance
For a robotic cell to perform well, the overall cycle time needs to be optimized. This requires addressing automation of a lot of auxiliary functions such as tool change, debris collection, calibration etc. This often requires adding additional hardware and software capabilities. This in turn can increase costs. Deploying a system requires a trade-off between cycle time and cost and finding a system design concept that delivers useful value. Demonstration projects often ignore these types of system design issues and narrowly focus on the process automation. Therefore, a lot of new technological development needs to take place to automate auxiliary functions before a system can be successfully deployed.
9. The overall production system is not streamlined to enable the automation solution to deliver its true value
Demonstration projects look at the process automation in insolation without considering upstream or downstream steps. Typically, a process step that faces quality issues or is challenging from an ergonomic perspective is targeted for automation. Even if this process step can be successfully automated, its overall efficacy can be limited by downstream processing steps. For example, if a downstream process is inefficient, it will become a bottleneck. Even if the automated process operates at high speed, it will not be fully utilized due to downstream bottlenecks and hence it cannot deliver its full value.
Additionally, if the downstream process is manual, then it might neutralize the high quality produced by the automated process. On the other hand, if an upstream process is manual and exhibits significant variability in quality, it can pose a challenge for the automated process. Variability may force the automated process to perform additional work, slowing it down, or result in lower quality outputs. Automation sometimes cannot fix quality problems originating from upstream processes. Therefore, when deploying an automated process step, it’s crucial to consider the entire workflow. This may require changes in the overall process flow and system-level optimization to ensure the automated process step can deliver the expected value. This step can take significant time and resources and hence delay deployment.
10. Infrastructure to update/upgrade software does not exist
Automation in high-mix applications utilizes a significant amount of software. This software needs to be maintained and updated at regular intervals. Demonstration projects do not account for these needs. Building infrastructure for continuous upgrades can be expensive for individual sites. But unfortunately, automation in high-mix applications cannot be deployed without this infrastructure.
11. ROI cannot be justified based on labor saving alone
Often, when efforts are made to mature a demonstration system into a production system, the cost increases rapidly because of all of the factors mentioned above. Therefore, ROI becomes hard to justify purely based on the labor savings. ROI can become more favorable if additional values are delivered. For example, automated solutions can reduce use of consumables and offer significant process innovation. These factors are not considered during demonstration projects and integrating these during deployment requires significant time and resources.
Most pilot demonstration projects mainly focus on demonstrating the feasibility of automating a process step. We have seen a lot of reinvention of known technologies/concepts during demonstrations projects. These types of demonstration projects do not add much value to technology deployment. Successfully, deploying robotic automation in high-mix manufacturing applications requires a lot of supporting technology development, system design, and consideration of workforce issues. All of these require substantial resources and time. Without a proper solution deployment roadmap, demonstration projects are likely to be shelved.
It is highly unlikely that the development of a few robotic cells will enable an organization to create the economy of scale necessary to be successful in deployment. Therefore, an organization interested in deploying robotic automation in high-mix manufacturing either needs to have demands for a large number of robotic cells to create the economy of scale internally or partner with an external organization that has already addressed the scaling issue.
About the author
 Dr. Satyandra K. Gupta is co-founder and chief scientist at GrayMatter Robotics. He also holds Smith International Professorship in the Viterbi School of Engineering at the University of Southern California and serves as the Director of the Center for Advanced Manufacturing. His research interests are physics-informed artificial intelligence, computational foundations for decision-making, and human-centered automation. He works on applications related to Manufacturing Automation and Robotics.
Dr. Satyandra K. Gupta is co-founder and chief scientist at GrayMatter Robotics. He also holds Smith International Professorship in the Viterbi School of Engineering at the University of Southern California and serves as the Director of the Center for Advanced Manufacturing. His research interests are physics-informed artificial intelligence, computational foundations for decision-making, and human-centered automation. He works on applications related to Manufacturing Automation and Robotics.
He has published more than five hundred technical articles in journals, conference proceedings, and edited books. He also holds twenty one patents. He is a fellow of the American Society of Mechanical Engineers (ASME), Institute of Electrical and Electronics Engineers (IEEE), Solid Modeling Association (SMA), and Society of Manufacturing Engineers (SME). He has received numerous honors and awards for his scholarly contributions. Representative examples include a Presidential Early Career Award for Scientists and Engineers (PECASE) in 2001, Invention of the Year Award at the University of
The post 11 reasons robots struggle to scale in high-mix manufacturing appeared first on The Robot Report.
View Source


