Iván Hernández Dalas: How to integrate collaborative robots into existing production lines without disruption
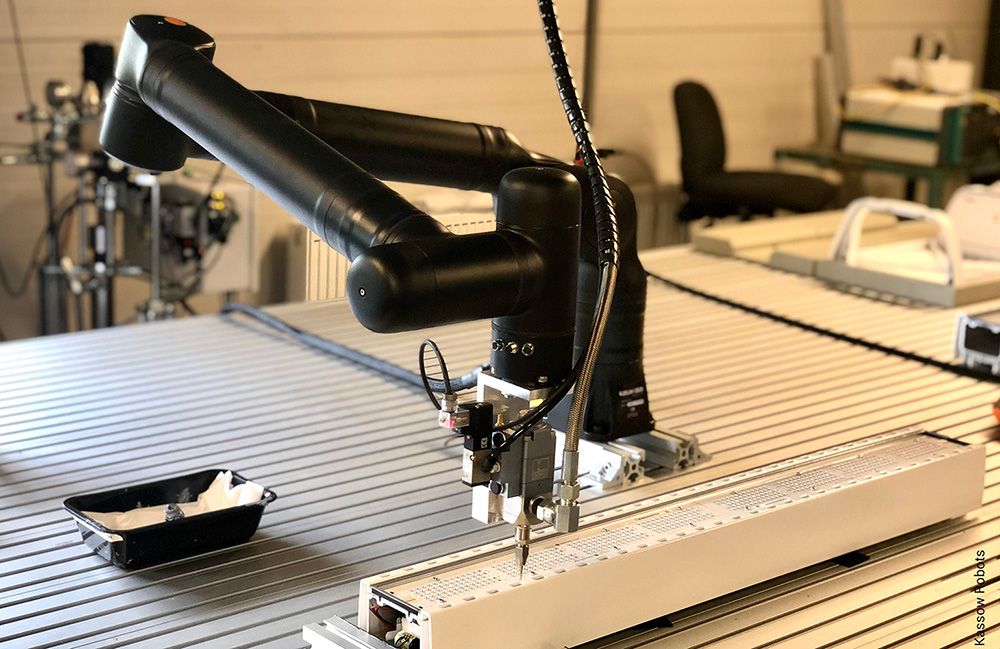
Kassow says its collaborative robots bring accuracy, efficiency, and customization to dispensing tasks. | Source: Kassow Robots
Collaborative robots are being adopted across manufacturing floors as a practical way to automate specific tasks within existing production constraints. Manufacturers need to improve their processes across several dimensions, such as making them more consistent, reducing strain on employees, and maximizing the space they are working with.
At the same time, manufacturers want to avoid pausing production or redesigning entire lines to achieve those goals. In those situations, cobots offer a practical path forward when they are integrated with a clear understanding of how the line already operates.
Adding a force- and power-limited robot to an established production line is rarely as simple as placing a robot at a station and pressing “Start.” Existing lines have a rhythm shaped by operator routines, physical layouts, and upstream and downstream dependencies. Introducing a robot without accounting for those realities can create additional inefficiencies instead of resolving existing ones.
However, when planned carefully cobots can help stabilize cycle time, reduce variation, and support operators without forcing major changes to surrounding processes.
Start with the right collaborative task
Task selection is one of the most important initial decisions. Collaborative robots tend to deliver the most value when assigned work that is repetitive, predictable, and physically demanding.
Common examples include loading or unloading parts, tending machines, transferring components between stations or handling routine inspection steps. These tasks often contribute disproportionately to operator fatigue and process variability over the course of a shift, even though they do not require critical problem-solving.
Integration efforts often struggle when automation is layered on top of an inconsistent task. If operators routinely compensate for fixture variation, adjust part placement, or work around tooling limitations, those issues will not disappear once a robot is added. In many cases, automation makes those inconsistencies more visible. Addressing them first allows the cobot to strengthen the station rather than inherit its problems.
Work within physical constraints

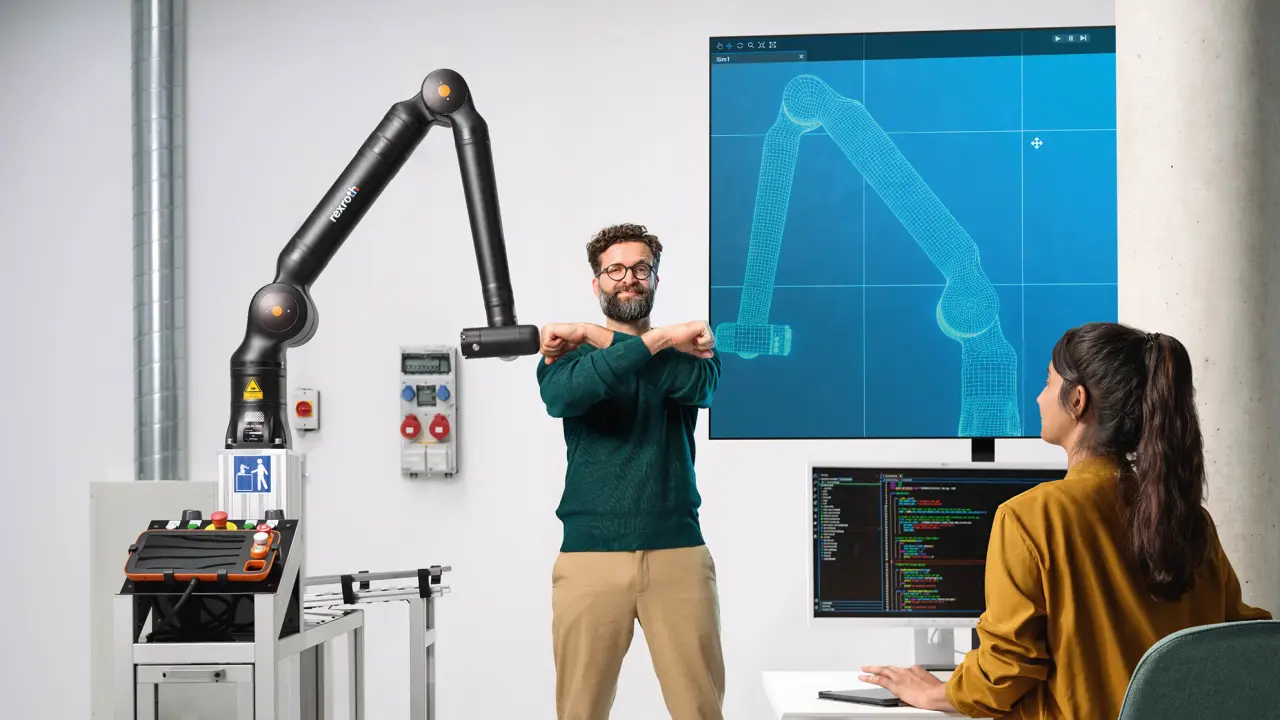
Cobots are intended to be easily reprogrammed and adapted to different tasks. | Source: Kassow
Space constraints are another major factor. Many existing production lines were never designed with robotics in mind. Stations may be tightly packed, equipment placement may be fixed, or operator walk paths may leave little room for additional hardware. In these environments, a robot’s ability to reach multiple interaction points from a single mounting location becomes more important than raw speed or payload capacity.
Cobots with extended reach and flexible joint configurations often approach parts and machines from angles that would otherwise require layout changes. An additional joint beyond a traditional six-axis design can provide greater freedom of motion, allowing the robot to navigate around fixtures or tooling while maintaining precise positioning. This flexibility enables side mounting or offset placement rather than positioning the robot directly in front of the station, which helps preserve access for operators and maintenance teams while keeping the overall footprint compact.
Compact bases and narrow mounting solutions further support integration in space-constrained environments, particularly in older facilities where floor space is already at a premium.

Preserve operator access and material flow
Even when a collaborative robot automates part of a task, operators still load components, remove finished parts, perform changeovers, and respond to alarms. If a robot’s placement forces operators to reach awkwardly or work around it, any gains in consistency are quickly lost. Successful integrations allow the cobot to work alongside people without interrupting how they move through the station.
Material flow deserves equal attention. A robot may be able to reach all its programmed positions, but if its motion disrupts the natural path of parts or introduces additional handling steps, overall throughput can suffer.
In many cases, delays are not caused by the robot’s cycle time, but by how its movements interact with the flow of material between processes. Cobots that can service multiple interaction points from a single base help maintain balance and reduce unnecessary handoffs.
Protect cycle time and line rhythm
Kassow cobots have sensors that detect overload, ensuring that they can operate safely in shared workspaces. | Source: Kassow Robots
Cycle time alignment is another common challenge. When a robot performs its task reliably, it must operate at a pace that matches the station it supports. Production lines often run at a defined tempo, and introducing a robot that operates faster or slower than surrounding processes can create new bottlenecks.
Reviewing the manual process before programming often shows that a cobot does not need to complete an entire task to add value. Automating the most repetitive or time-sensitive portion of the work is often enough to improve overall station performance.
How the cobot moves is equally important. Smooth, predictable movement helps operators understand what the robot will do next and reduces hesitation when working nearby. This also applies to how cobots resume operations after a stoppage. Operators should be able to resume production quickly after interruptions without navigating complex reset sequences or relying on specialized support.
Design for collaborative change over time
Cobot integration decisions should also account for how the production line may evolve. Product mixes shift, volumes fluctuate, and stations change over time.
Mounting approaches and programming strategies that allow a robot to be adjusted or redeployed provide a stronger return on investment beyond the initial application. Systems that allow a cobot to support multiple positions from a single base can provide flexibility when requirements change without requiring a full reinstallation.
Collaborative robots tend to deliver the most value when they are treated as part of the existing production system rather than an add-on. Integrations that respect operator routines, physical constraints, and line rhythm are more likely to improve consistency without disruption.
As manufacturers continue to balance productivity demands with limited space and aging infrastructure, cobots will remain a practical tool, not because they replace people, but because they are designed to work alongside them.
 About the author
About the author

Dieter Pletscher is the global sales manager at Kassow Robots. He has over a decade of experience selling robotics, and previously worked for Universal Robots.
The post How to integrate collaborative robots into existing production lines without disruption appeared first on The Robot Report.
View Source


