Iván Hernández Dalas: How gearbox ratio selection impacts inertia matching, servo tuning, and machine performance
Sponsored by GAM.
Imagine a small child trying to push a full-size adult in a shopping cart. It’s possible to get the cart moving (barely), but it would be very hard to start or stop. Steering could be disastrous—the child may not make it around a corner in time.

A high inertia ratio between a load and a servo motor is like a small child pushing a heavy cart; it would be difficult to start and stop, and response can be sluggish. (Image courtesy of GAM.)
“In servo tuning, this is when you don’t have enough of a ratio in your gearbox, and your inertia ratio between your motor and load is too high,” says Matt Ruggles, senior design engineer at GAM, a U.S.-based manufacturer of servo gear reducers and other motion control components.
Now consider a large adult who doesn’t know their own strength, pushing a small child in a shopping cart. They could completely overpower the cart, making turns too fast and throwing the child around inside the basket, potentially hurting them.
“This would be the opposite end where the motor inertia is much higher than the load inertia,” says Ruggles. “You’ve probably put more money into your motor and drive than you need to, and you can damage your equipment by changing the motion too quickly.”
Inertia matching is a key factor in sizing a servo system. It refers to the ratio between load inertia and motor inertia, which affects a motor’s ability to control its load during acceleration and deceleration.
Inertia Ratio = JLOAD / JMOTOR
where JLOAD is the load inertia reflected to the motor and JMOTOR is the motor inertia. Load inertia includes all rotating components in the system, such as the drive, external mass and coupling.
Designers must determine what inertia ratio is acceptable based on the dynamics of the motion and the level of accuracy required. A 1:1 inertia ratio is considered ideal because it provides the best control and is easiest to tune. However, striving for a perfect match is not always practical, and pushing too close can lead to an oversized motor, higher system cost and increased energy consumption.
“Typically, these days you can get up to a 10:1 ratio where the load is 10 times bigger than the motor,” says Ruggles. “Once you get beyond that, the servo tuning starts to become much more difficult. It used to be you’d try to get within 5:1, but servo controls have gotten much better.”
When inertia matching is poor due to a high inertia ratio or improper tuning, the system may respond sluggishly and produce vibration or noise. The load may fail to settle at its intended position, continuing to drift instead of reaching its endpoint. It may overshoot its target, then oscillate back and forth as the motor tries to compensate. Since the motor is working harder to control the load, it would also draw more current, impacting efficiency and cost.
One way to get a smaller motor to control a larger load is to bring a high inertia ratio closer to 1:1 by adding a gearbox.
JREFLECTED = (JLOAD / i2) + JGEARBOX
where i is the gearbox ratio, and JGEARBOX is the inertia of the gearbox.
“The ratio of the gearbox impacts the inertia ratio by a square factor—so a 10:1 gearbox has a 100:1 impact on the inertia ratio,” explains Ruggles. “You can get a big advantage very quickly by adding a gearbox to your system.”
While the gearbox itself adds inertia to the system, its contribution is small compared to the reduction achieved through the gear ratio.
Proper servo tuning can also counteract the effects of a high inertia ratio by giving the servo motor a better sense of how to control the load. Going back to the shopping cart analogy, it’s like the child pushing the cart learning to anticipate how it will react, slowing down ahead of a turn or preparing in advance to stop at the end of the aisle.
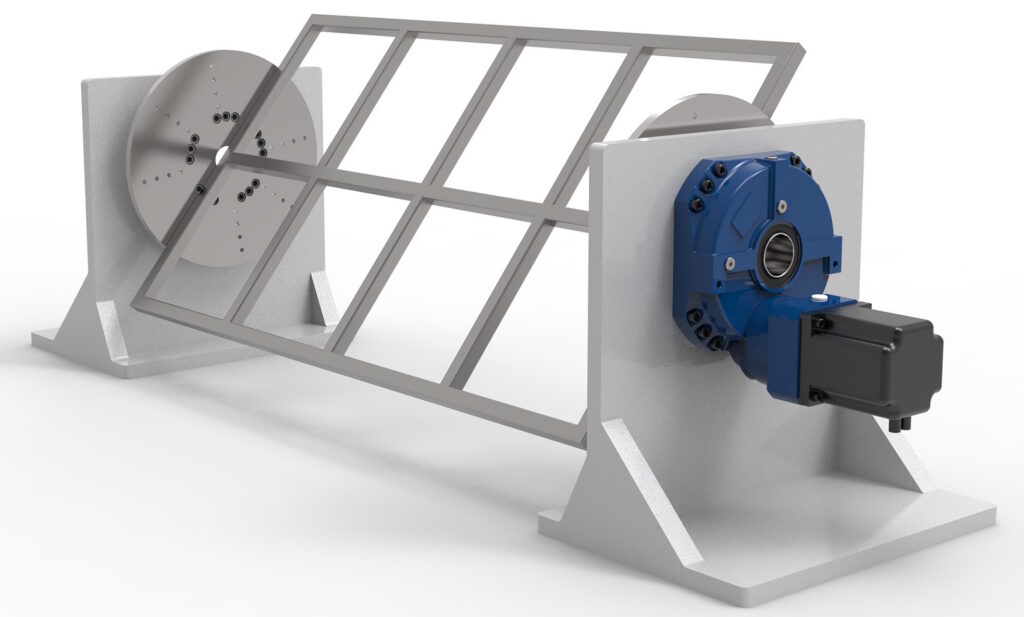
Using a high ratio, precision gearbox, such as GAM’s GPL robotic planetary, brings the inertia ratio closer to 1:1, allowing a smaller motor to precisely control the large, heavy load of a trunnion, for example, commonly used as robotic weld positioners in automotive applications. (Image: GAM.)
Another way to reduce the inertia ratio is to use a larger motor with higher inertia. However, larger motors are typically more expensive and run at lower speeds.
“The trick with adding a gearbox is that it is going to slow down the output speed based on what the motor is spinning at,” says Ruggles. “If you try and use a large inertia motor that can’t run very fast combined with a gearbox, now your output is going to be very slow.”
Applications that rely on lower inertia ratios include systems with high acceleration and deceleration or precise positioning demands; for example, robotics in the packaging industry need bottles to line up perfectly with a nozzle and then swiftly move out of position.
GAM offers a wide range of gearbox options, from high-performance solutions to more cost-effective designs.
“Application requirements can drive what type of gearboxes and motors you use, all the way down the system,” says Ruggles. “We have a full engineering team for the more fun designs where you really have to dive in and do some problem solving in order to achieve what the customer is looking for.”
To learn more, visit GAM.
The post How gearbox ratio selection impacts inertia matching, servo tuning, and machine performance appeared first on The Robot Report.
View Source


