Iván Hernández Dalas: How offline programming reduces machining automation deployment times
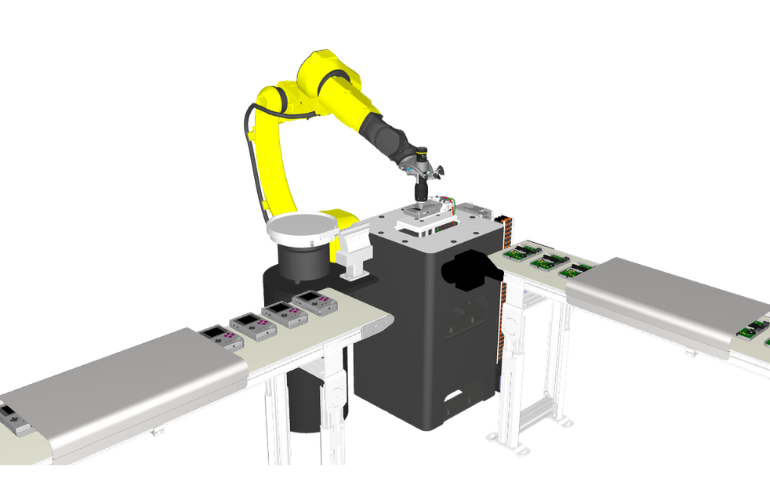
Simulation and offline programming capabilities extend beyond machining to include tasks like assembly, finishing, and welding. This screenshot of RoboDK software shows a simulation designed to ensure fast and safe programming and deployment of an advanced assembly application. Credit: RoboDK
Robotic machining has grown in popularity in recent years, driven by lower robot costs and increased flexibility. Compared with large CNC machines, industrial robots are relatively inexpensive, easy to move around, and can be redeployed on multiple applications.
CNC machines are the gold standard for accuracy-critical sectors such as aerospace because they are so predictable. However, for companies interested in high-mix/low-volume batches and those operating in sectors not subject to stringent aerospace requirements, CNC machines can be an over-engineered solution.
For materials like wood, foam, plastics, aluminum, and increasingly even hard materials, robots offer a significantly lower-cost alternative to over-engineered CNC solutions without sacrificing necessary quality
Understanding robot complexity
So far so good, but robots introduce unique complexities. For example, while CNC machines operate within a clearly defined, rectangular workspace, a robot’s workspace is spherical and joint-dependent. This means that even if a target point lies within the robot’s reach, it may not be accessible with the required orientation.
These constraints are manageable, but only when they are understood in advance, and that requires end users with considerable knowledge of robot cell design and programming.
The programming bottleneck
The time it takes to manually program, test, and validate robotic machining applications is a major bottleneck in machining robot deployments. This is where offline programming (OLP) software, especially those with integrated CAM (computer-aided manufacturing) capabilities, can make a real difference.
For simple robotic applications, such as pick and place, manual programming is still common. Machining applications are very different. They often require robots to follow paths with hundreds of thousands and even millions of points. Each point must be positioned correctly, oriented properly, and executed without collisions, axis limits, or singularities.
Manually defining such paths is not humanly possible. Even modestly complex shapes require a level of precision and repeatability that human programmers cannot achieve by hand.
Moreover, manual approaches tend to rely on trial-and-error and repeated tweaks on the robotic machining cell until the application works correctly. This ties up equipment, stretches deployment timelines into days and weeks, and increases the risk of scrapped parts and damaged tools.

Offline programming can produce real-world results
Offline programming eliminates tedious manual programming requirements and writes the code required to bring your automated machining cell to life. This speeds deployments and redeployments and enables companies to adopt automation quickly.
Instead of programming at the robot, OLP enables end users to work in a safe, virtual environment that mirrors the real cell from the robot itself to the tooling, fixtures, workpiece, and required process parameters. The software generates machining paths automatically from CAD models using CAM strategies rather than manually coded points.
Using offline programming tools, machining applications that would take days or weeks to set up manually can be programmed, simulated, and finalized in under an hour. OLP also makes it possible to achieve complex geometries that are impossible to achieve by hand. This feature empowers end users to explore imaginative strategies and applications.
All of this happens without production downtime as the robot cell and code are validated and programmed offline before deployment. You want your robot to spend its time machining, not waiting for the latest set of trial-and-error instructions from a human.
OLP software like RoboDK CAM enables fast testing of different robot paths, even on complex parts. This empowers users to explore their creative side. Credit: RoboDK
Simulating the singularity
Robots are prone to singularities, joint limit violations, and unexpected collisions, particularly in tight and complex workspaces. Errors in machining applications involving heat or material deposition can destroy high-value parts and require lengthy recovery procedures.
Offline simulation software allows engineers to detect and resolve potential issues before deployment. The software automatically evaluates reachability, joint motion, collision risk, and process continuity across the entire toolpath. And problems that would otherwise appear mid-cycle are identified and fixed virtually.
Integrated CAM matters
Not all OLP tools are equally suited to machining. Some were originally developed for robotics and later extended to support machining in limited ways. Others began as CNC CAM systems and added robotic support later.
Integrated CAM matters because robotic machining is not simply CNC machining with a different arm. It requires coordinated control of tool orientation, material strategies, and sometimes multiple synchronized axes such as turntables or positioners.
CAM functionality enables automated toolpath generation, advanced multi-axis strategies, and material-removal simulation. This allows users to see not just how the robot moves, but how the part itself moves during machining. Without this integration, users are forced into workarounds, increasing the time spend, risk, and overall complexity of the project.

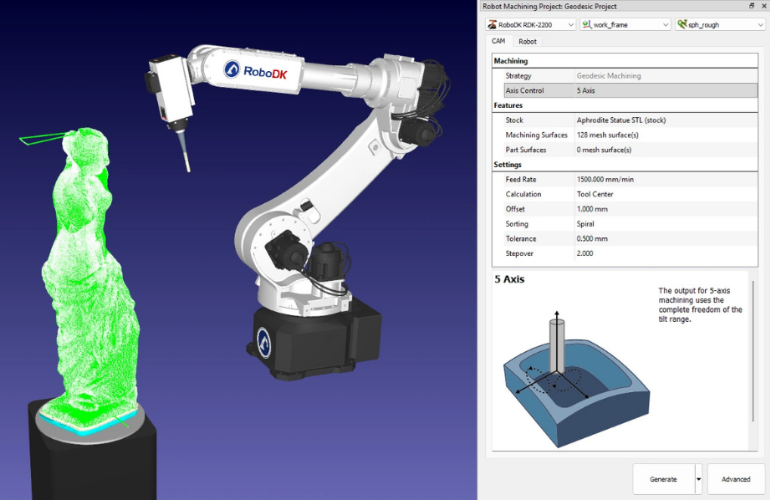
OLP software like RoboDK CAM automatically generates code based on CAD/CAM designs. This enables the machining of complicated geometrical shapes that would be practically impossible to program manually. Credit: RoboDK
Rapid deployments in high-mix environments
Offline programming software can make a massive difference to high-mix/low-volume manufacturers. When every machining job has different requirements, programming dominates total cycle time. Reducing setup times from days and weeks to just minutes allows companies to achieve faster returns on their automation investments.
OLP tools also enable experimentation. Engineers can test different robot placements, tooling orientations, and machining strategies digitally before committing to a physical setup. In many cases, OLP software is purchased before any robot hardware, allowing teams to evaluate feasibility and test massive libraries of robots and peripherals against real-world requirements.
The essential requirements for offline programming
Not all offline programming software is the same when it comes to machining applications. Here’s a brief checklist of the most important features to look for:
- Integrated CAM capabilities
Automated toolpath generation, material strategies, and multi-axis machining support. - Accurate robotic simulation
Detection of singularities, joint limits, reach issues, and collisions before execution. - Material removal visualization
The ability to simulate how the part changes during machining, not just robot motion. - Ease of use
Intuitive software reduces reliance on specialist programmers and shortens learning curves. - Support for synchronized axes
Coordination of robots with turntables, positioners, or external axes for complex setups.
Robotic machining represents the future of flexible manufacturing, but its success hinges on moving away from the “trial and error” of the teach pendant. By adopting the latest OLP software with integrated CAM, manufacturers can transform a weeks-long deployment into a sub-one-hour task. The question is no longer “Can a robot machine a part?” but “How quickly can you instruct it to do so?”
To see offline programming in action, download a trial of RoboDK to simulate a machining project in minutes.

About the author
Albert Nubiola is the founder and CEO of RoboDK, a leading software provider for industrial robot simulation and offline programming. With a deep technical background in robotic calibration and kinematics, Nubiola founded RoboDK in 2015 as a spin-off from the CoRo laboratory at École de Technologie Supérieure (ÉTS).
Since then, the RoboDK platform has grown to support over 1,000 robot arms from 80 different manufacturers, making high-level automation accessible to businesses of all sizes. Nubiola is a frequent contributor to the robotics community, focusing on the intersection of software flexibility and manufacturing efficiency.
The post How offline programming reduces machining automation deployment times appeared first on The Robot Report.
View Source


