Iván Hernández Dalas: Advantages of hypoid gearing over worm, bevel and bevel-planetary
Sponsored by GAM.
Right-angle gearing has a way of making engineers decide where to compromise. Much of that stems from the position of the input pinion relative to the output gear, which affects available ratios, load-carrying capability and efficiency. The tradeoff usually comes down to ratio density or torque capacity on one side, and mechanical efficiency on the other.
The three most common types of right-angle gearing are spiral bevel, worm and hypoid. Of these, hypoid offers a balance of mechanical efficiency, load-carrying capability and single-stage ratio range. In this article, we’ll explore how hypoid compares to worm, bevel and bevel-planetary gearing.
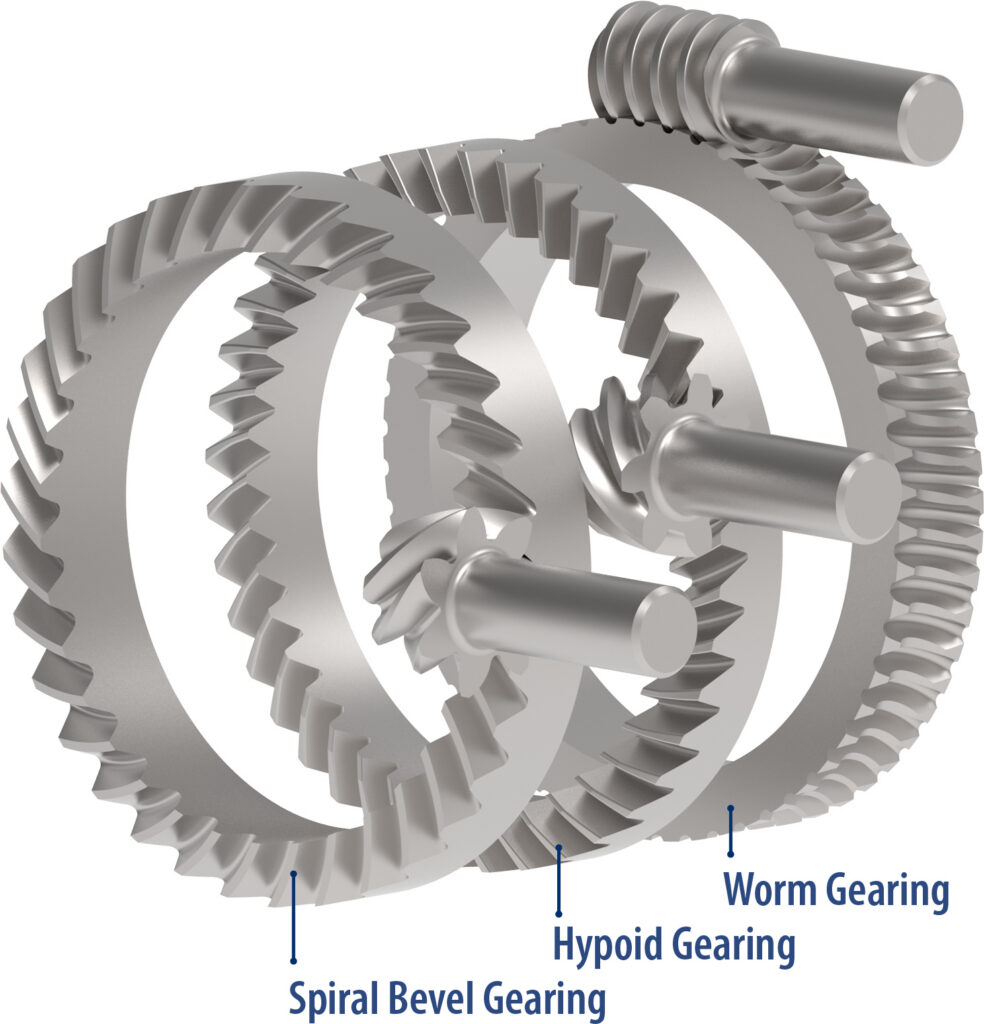
Common types of gearing used in right angle gearboxes include bevel, hypoid and worm. (Image: GAM.)
What is hypoid gearing?
Hypoid gearing is a type of spiral gearing in which the axes are offset from each other. Its meshing action is mostly rolling with a small component of sliding. This combination gives hypoid gearing high mechanical efficiency while helping limit wear over time. It also provides greater tooth contact area, contributing to high load-carrying capability. Hypoid gearing offers medium-to-higher single-stage ratios, typically up to 10:1 or 15:1.
Hypoid vs worm gearing
Worm gearing uses a gear similar to a spur gear and a pinion that resembles a screw, with the pinion positioned perpendicular to the output gear. Its meshing action has a high component of sliding, which generates friction and results in the lowest mechanical efficiency of the three right-angle gearing types.
The design does offer some advantages. Worm gearing has very high total tooth contact area, leading to the highest torque capacity of the gearing options. In terms of single-stage ratios, worm gears usually start around 10:1 to 15:1 and can go to 100:1 or higher.
Since hypoid gearing combines rolling action with only a small amount of sliding, it offers higher efficiency than worm gearing and is less prone to wear over time.
“Because there is so much sliding action in a worm gear, a lot of times one of the gears—the wheel—will be made out of a softer material such as bronze or brass to help with the sliding friction,” says Matt Ruggles, senior design engineer at GAM, a U.S.-based manufacturer of servo gear reducers and other motion control components. “The gear set tends to wear faster, and so your backlash will open up over time much quicker than in a hypoid gear.”
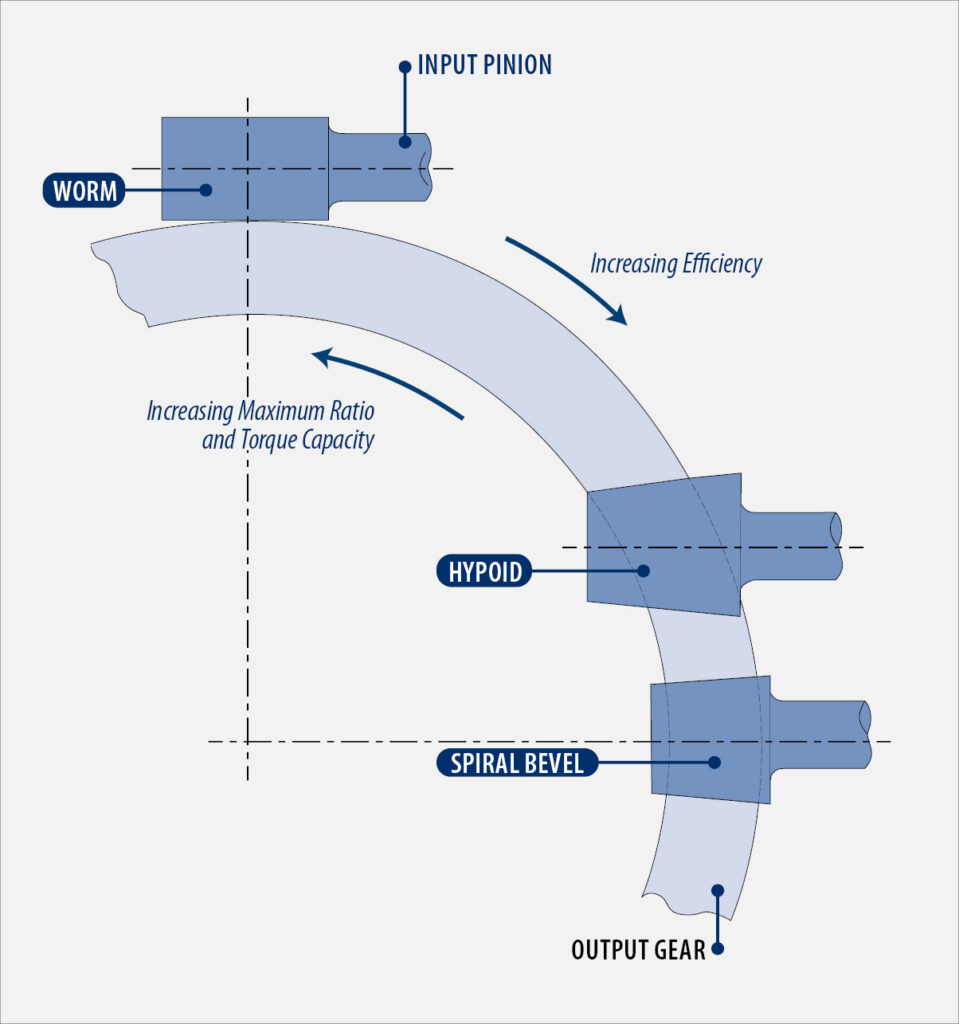
The pinion-to-gear arrangement varies across hypoid, worm and bevel gearing, each representing a different tradeoff of efficiency against gear ratio and torque capacity. (Image: GAM.)
Hypoid vs bevel gearing
Bevel gearing uses straight or helical teeth, with the pinion and output gear on intersecting axes. Because the teeth mesh through a purely rolling action, there is very little sliding at the gear mesh.
“Bevel gearing is the most efficient of all the gearing types for right-angle, but it is much more ratio limited,” says Ruggles. “You can do some speed increasing. When you get to speed decreasing, when you get around to the higher ratios, you start sacrificing torque capacity pretty quickly. So 6:1 is about where people usually stop, at least in normal applications.”
While hypoid is somewhat less efficient on account of its small amount of sliding action, it has greater tooth contact area than bevel gearing, giving it greater load-carrying capability. It can also achieve higher single-stage ratios within a similar size envelope than bevel.
Hypoid vs bevel-planetary gearing
One way to gain additional ratios with a bevel gear is to pair it with a planetary stage.
“The downside there is now you’re paying for two gear sets, the bevel and the planetary,” says Ruggles. “Even though the bevel is more efficient, because of the additional gear set, that’s a hit to your efficiency.”
Then there’s the issue of size. A bevel-planetary is a larger unit because it has two gear sets, along with the bearings and other components that have to fit together. Hypoid can reach similar ratios with one gear set; bevel-planetary units range from 3:1 to 10:1 with two stages of gearing, while a hypoid can cover 3:1 to 15:1 with a single stage of gearing and within a denser gearbox.
“Hypoid offers similar torque or better torque density in a smaller envelope, same ratio options, with roughly equivalent efficiency,” says Ruggles. “In addition, because there’s only one gear set, you have much better control over backlash. Because there are fewer components, it’s a much stiffer system.”
Applications where hypoid gearing fits best
Hypoid gearing is well suited to applications that need ratio capability, strength and efficiency within a compact form factor (think, robotics). It developed out of the automotive industry and was later adopted into the servo industry with gearboxes such as GAM’s Dyna-Lite and Dyna Series.
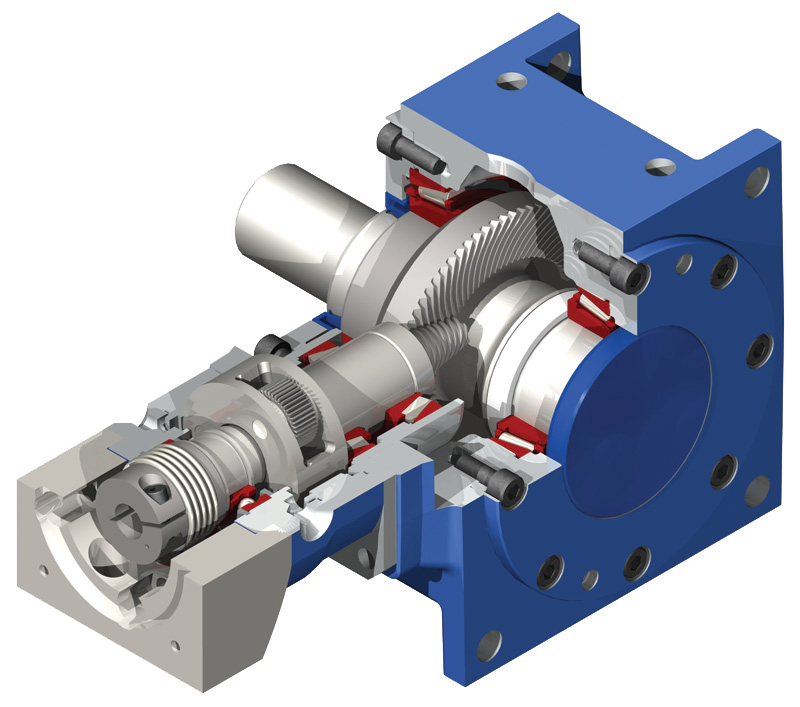
GAM’s Dyna Series high-precision hypoid gearboxes provide backlash as low as 1 arcmin and efficiency as high as 96%. (Image: GAM.)
“We have a lot of experience with hypoid gearing,” says Ruggles. “We know what applications work really well for it, what applications are better for other technologies, and we’re able to customize those solutions to match what a customer needs. We have put planetaries at the inputs of hypoids. If you need a 1000:1 gearbox, but you don’t want a worm gearbox, you can get the ratio you need for much better efficiency and a lot of times a much better form factor.”
To learn more about right-angle gearboxes, visit GAM.
The post Advantages of hypoid gearing over worm, bevel and bevel-planetary appeared first on The Robot Report.
View Source


